






BOSM - Horizontalna kontra bušilica i bušilica
1. Upotreba opreme:
BOSM stroj za horizontalno kontra bušenje i bušenje je poseban stroj za vašu tvrtku za obradu kapica toranjskih dizalica. Stroj je opremljen s 2 kompleta vodoravnih glava za bušenje i bušenje, koje mogu realizirati bušenje, glodanje i bušenje izradaka unutar efektivnog raspona hoda. Rezanje i druga obrada, brzina pozicioniranja opreme je velika, točnost obrade je visoka, a učinkovitost obrade je visoka.
2. Karakteristike strukture opreme:
2. 1. Glavne komponenteStroj
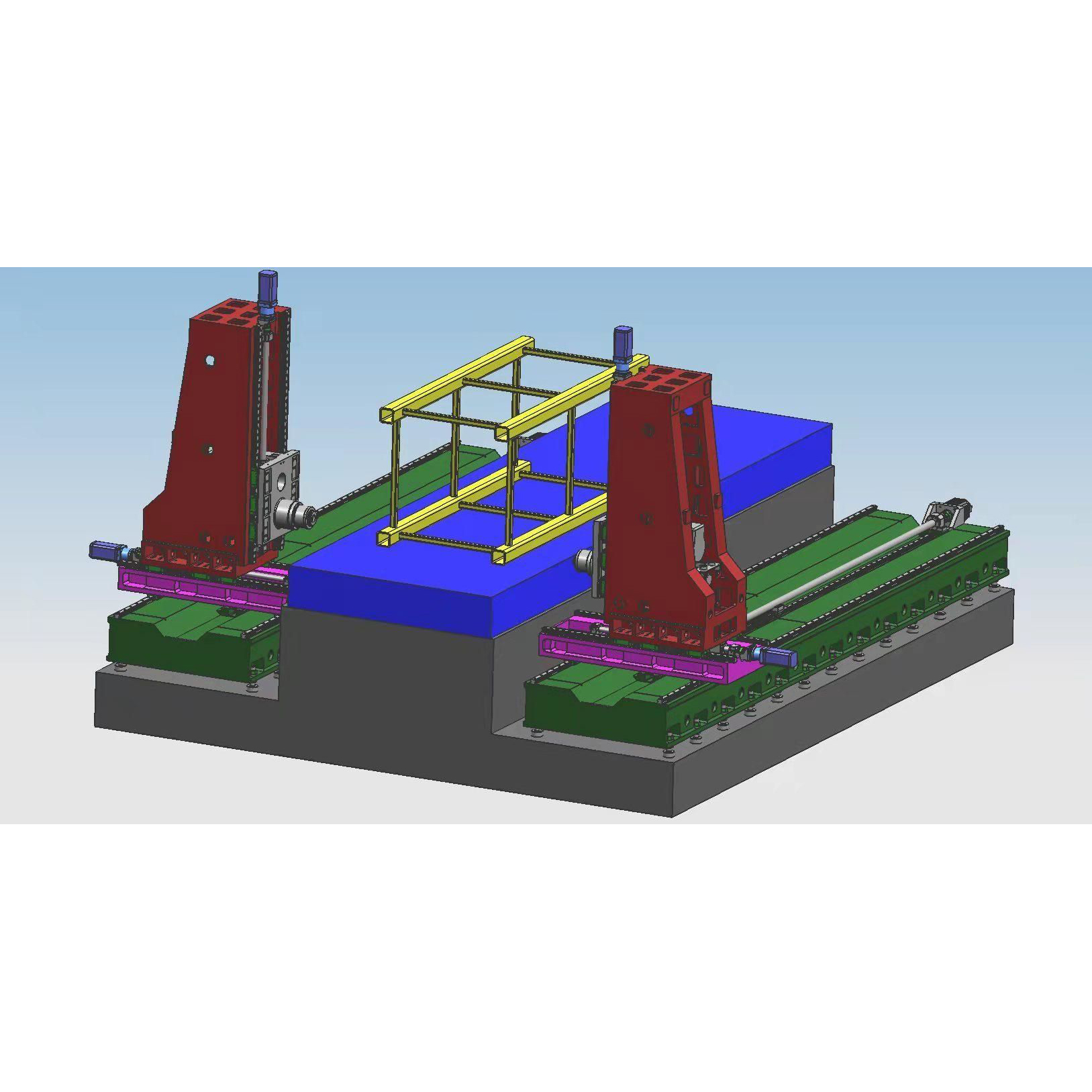
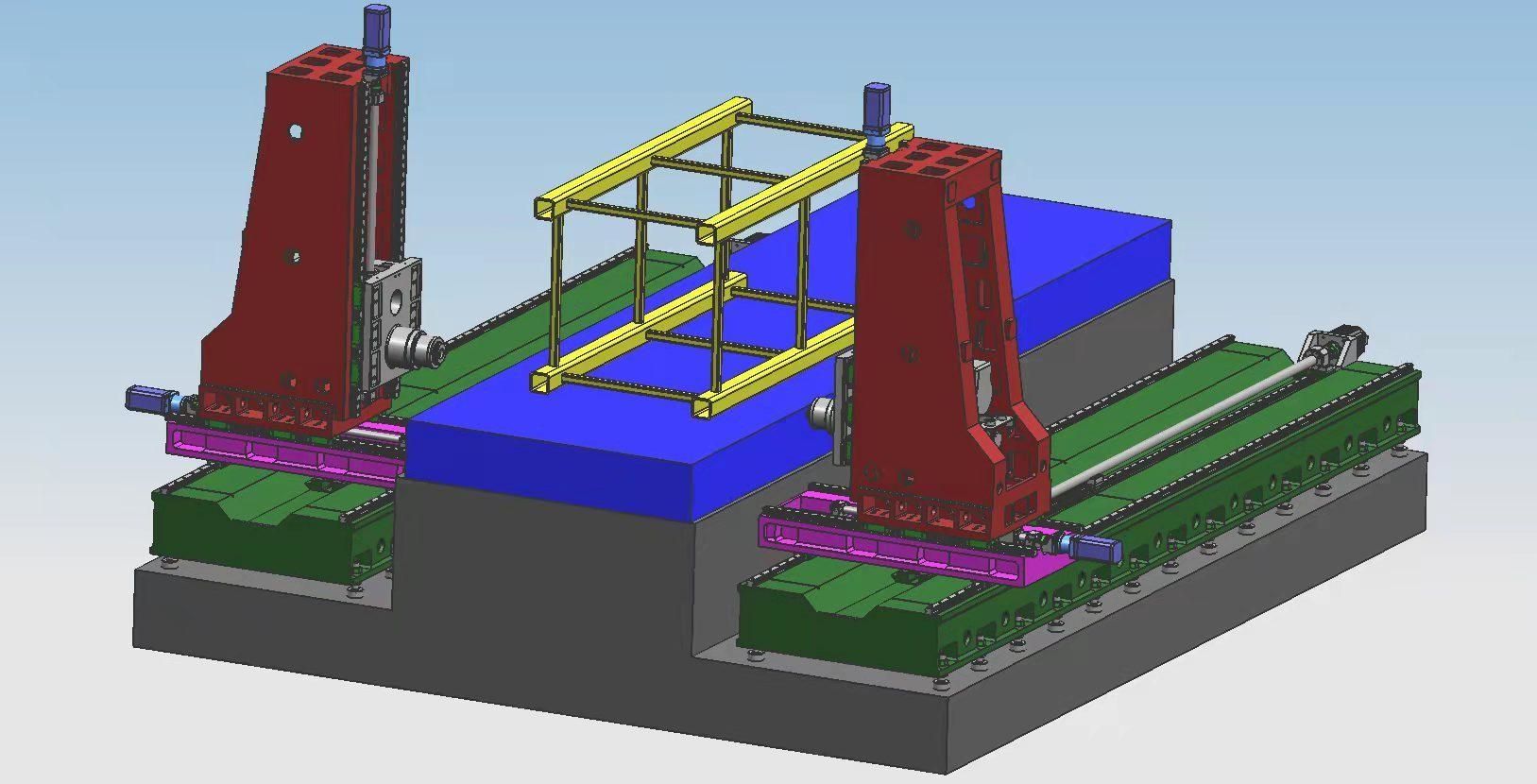
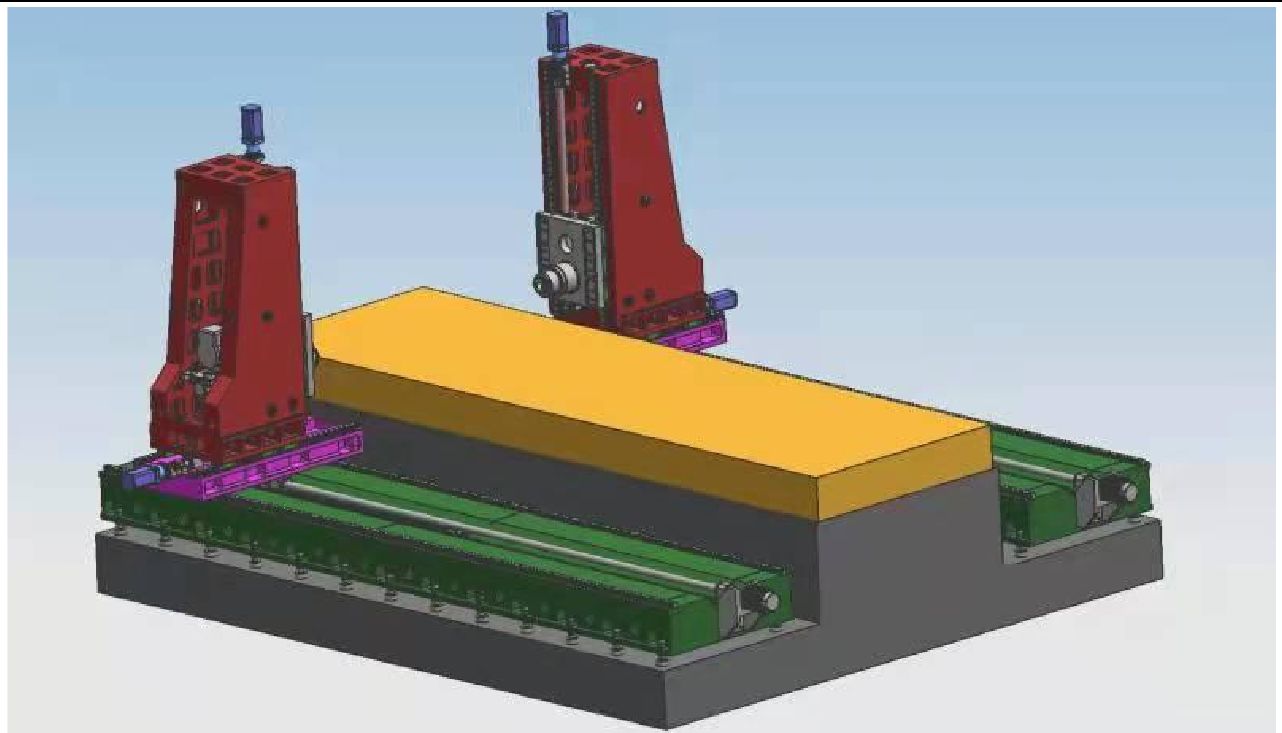
Glavne komponente stroja: krevet, radni stol, lijevi i desni stup, sedla, ramovi, itd., veliki dijelovi izrađeni su od kalupljenja smole i pijeska, visokokvalitetnog sivog željeza 250, žarenog u jami s vrućim pijeskom→vibracijsko starenje→vruće žarenje u peći→vibracijsko starenje→ gruba strojna obrada→vibracijsko starenje→žarenje u peći→vibracijsko starenje→završna obrada za potpuno uklanjanje negativnog naprezanja dijelova i održavanje performansi dijelova stabilnim. Radni stol opreme je fiksan, a pogonske glave s obje strane mogu se pomicati u prednjem i stražnjem smjeru baze; Stroj ima funkcije kao što su bušenje, provrtanje, upuštanje, narezivanje itd. Metoda hlađenja alata je unutarnje hlađenje plus vanjsko hlađenje. Stroj sadrži 5 pogonskih sjekira, 2 rezne pogonske glave, koje mogu biti sinkronizirane s 5 sjekira u isto vrijeme ili mogu biti jednostruke. Aksijalni smjer stroja i pogonska glava prikazani su na donjoj slici.
2. 2 Glavna struktura dovodnog dijela aksijalnog prijenosa
2.2.1 X os: Pogonska glava klizi bočno duž vodilice baze.
Pogon osi X1: servo motor izmjenične struje plus planetarni reduktor visoke preciznosti koristi se za pokretanje glave snage kroz pogon s kugličnim navojem kako bi se ostvarilo linearno kretanje X-osi.
Prijenos X2-osi: AC servo motor i visokoprecizni planetarni reduktor koriste se za pogon glave snage kroz prijenos s kugličnim navojem kako bi se ostvarilo linearno kretanje po X-osi.
Oblik vodilice: Dvije precizne linearne vodilice visoke čvrstoće popločane su na proširenoj osnovi.
2.2 Y1 os: Pokretna glava klizi gore-dolje na stupu.
Pogon osi Y1: Usvojite AC servo motor za vožnju kroz kuglični vijak za ostvarivanje linearnog gibanja osi Y1. Oblik vodilice: 4 komada linearnih vodilica tipa 45.
2.2.3 Y2 os: Pogonska glava se kreće recipročno gore-dolje na stupu.
Prijenos Y2-osi: AC servo motor se koristi za vožnju kroz kuglični vijak za postizanje linearnog gibanja Y1-osi.
Oblik vodilice: 4 komada linearnih vodilica tipa 45.
2.2.4 Os Z1: Pokretna glava klizi naprijed-natrag na sjedalu.
Prijenos osi Z1: AC servo motor i planetarni reduktor visoke preciznosti koriste se za pokretanje kretanja kroz kuglični vijak kako bi se ostvarilo linearno gibanje osi Z1.
2.2.5 Os Z2: Pokretna glava kruži naprijed-natrag na sjedalu.
Prijenos po osi Z2: AC servo motor i planetarni reduktor visoke preciznosti koriste se za pokretanje kretanja kroz kuglični vijak kako bi se ostvarilo linearno gibanje po osi Z2.
2.3. Uklanjanje strugotine i hlađenje
Postoje ravni lančani transporteri za strugotinu instalirani s obje strane ispod radnog stola, a željezna strugotina može se ispustiti u transporter za strugotinu na kraju kako bi se ostvarila civilizirana proizvodnja. U spremniku rashladne tekućine transportera strugotine nalazi se pumpa za hlađenje, koja se može koristiti za unutarnje hlađenje + vanjsko hlađenje alata kako bi se osigurala izvedba i vijek trajanja alata, a rashladno sredstvo se može reciklirati.
3. Potpuno digitalni sustav numeričkog upravljanja:
3.1. Uz funkciju lomljenja strugotine, vrijeme lomljenja strugotine i ciklus lomljenja strugotine mogu se postaviti na sučelju čovjek-stroj.
3.2. Uz funkciju podizanja alata, udaljenost podizanja alata može se postaviti na sučelju čovjek-stroj. Kada se dosegne udaljenost, alat će se brzo podići, a zatim će strugotina biti odbačena, a zatim brzo naprijed do površine za bušenje i automatski prebačena u rad.
3.2. Centralizirana upravljačka kutija i ručna jedinica imaju sustav numeričkog upravljanja i opremljeni su USB sučeljem i LCD zaslonom s tekućim kristalima. Kako bi se olakšalo programiranje, pohranjivanje, prikaz i komunikacija, operativno sučelje ima funkcije kao što su dijalog čovjek-stroj, kompenzacija pogreške i automatski alarm.
3.2.. Oprema ima funkciju pregleda i ponovnog pregleda položaja rupe prije obrade, a rad je vrlo prikladan.
4. Automatsko podmazivanje
Strojni precizni parovi linearnih vodilica, precizni parovi s kugličnim navojem i drugi visokoprecizni parovi za kretanje opremljeni su automatskim sustavima podmazivanja. Automatska pumpa za podmazivanje ispušta ulje pod pritiskom, a komora za kvantitativno ulje za podmazivanje ulazi u ulje. Kada se uljna komora napuni uljem i tlak u sustavu poraste na 1,4~1,75Mpa, sklopka tlaka u sustavu se zatvara, pumpa se zaustavlja, a istovarni ventil se istovremeno prazni. Kada tlak ulja u cesti padne ispod 0,2Mpa, kvantitativni podmazivač počinje puniti točku podmazivanja i dovršava jedno punjenje uljem. Zbog precizne količine ulja koju isporučuje kvantitativni podmazivač i mogućnosti detektiranja tlaka u sustavu, opskrba uljem je pouzdana i osigurava postojanje uljnog filma na površini svakog kinematičkog para, što smanjuje trenje i trošenje te sprječava oštećenja na unutarnju strukturu uzrokovanu pregrijavanjem. , kako bi se osigurala točnost i vijek trajanja Stroja.
5. Strojokolina korištenja:
Napajanje: Trofazni AC380V±10%, 50Hz±1 Temperatura okoline: -10°~ 45°
6. Kriteriji prihvaćanja:
JB/T10051-1999 "Opće tehničke specifikacije za hidraulički sustav strojeva za rezanje metala"
7. Tehnički parametri:
| Model | 2050-5Z | |
| Maksimalna veličina obratka za obradu | Duljina × širina × visina (mm) | 5000×2000×1500 |
| veličina radnog stola | Duljina X Širina (mm) | 5000*2000 |
| Kretanje glave u osnovnom smjeru kretanja | Pomicanje naprijed-nazad (mm) | 5000 |
| Snažna glava gore i dolje | Hod klipa gore i dolje (mm) | 1500 |
|
Horizontalna cilindarska glava za bušenje Električna glava 1 2 | Količina (2 kom.) | 2 |
| Konus vretena | BT50 | |
| Promjer bušenja (mm) | Φ2-Φ60 | |
| Promjer rezanja (mm) | M3-M30 | |
| Brzina vretena (r/min) | 30~3000 | |
| Snaga motora servo vretena (kw) | 22*2 | |
| Lijevi i desni hod (mm) | 600 | |
| Dvosmjerna točnost pozicioniranja | 300mm*300mm | ±0,025 |
| Dvosmjerna ponovljena točnost pozicioniranja | 300mm*300mm | ±0,02 |





